Collision
Have you ever been in a car accident? What did you collide with? Just like with cars, PhysicBody objects can come in contact. Collisions are what happens when PhysicBody objects come in contact with each other. When a collision takes place it can be ignored or it can trigger events to be fired.
Filtering Collisions
Collision filtering allows you to enable or prevent collisions between shapes. This physics engine supports collision filtering using category and group bitmasks.
There are 32 supported collision categories. For each shape you can specify which category it belongs to. You can also specify what other categories this shape can collide with. This is done with masking bits. For example:
auto visibleSize = Director::getInstance()->getVisibleSize();
s_centre = Vec2(visibleSize.width/2, visibleSize.height/2);
auto sprite1 = addSpriteAtPosition(Vec2(s_centre.x - 150,s_centre.y));
sprite1->getPhysicsBody()->setCategoryBitmask(0x02); // 0010
sprite1->getPhysicsBody()->setCollisionBitmask(0x01); // 0001
sprite1 = addSpriteAtPosition(Vec2(s_centre.x - 150,s_centre.y + 100));
sprite1->getPhysicsBody()->setCategoryBitmask(0x02); // 0010
sprite1->getPhysicsBody()->setCollisionBitmask(0x01); // 0001
auto sprite2 = addSpriteAtPosition(Vec2(s_centre.x + 150,s_centre.y),1);
sprite2->getPhysicsBody()->setCategoryBitmask(0x01); // 0001
sprite2->getPhysicsBody()->setCollisionBitmask(0x02); // 0010
auto sprite3 = addSpriteAtPosition(Vec2(s_centre.x + 150,s_centre.y + 100),2);
sprite3->getPhysicsBody()->setCategoryBitmask(0x03); // 0011
sprite3->getPhysicsBody()->setCollisionBitmask(0x03); // 0011
You can check for collisions by checking and comparing category and collision bitmasks like:
if ((shapeA->getCategoryBitmask() & shapeB->getCollisionBitmask()) == 0
|| (shapeB->getCategoryBitmask() & shapeA->getCollisionBitmask()) == 0)
{
// shapes can't collide
ret = false;
}
Collision groups let you specify an integral group index. You can have all shapes with the same group index always collide (positive index) or never collide (negative index and zero index). Collisions between shapes of different group indices are filtered according the category and mask bits. In other words, group filtering has higher precedence than category filtering.
Contacts/Joints
Recall from the terminology above that joints are how contact points are connected to each other. Yes, you can think of it just like joints on your own body.
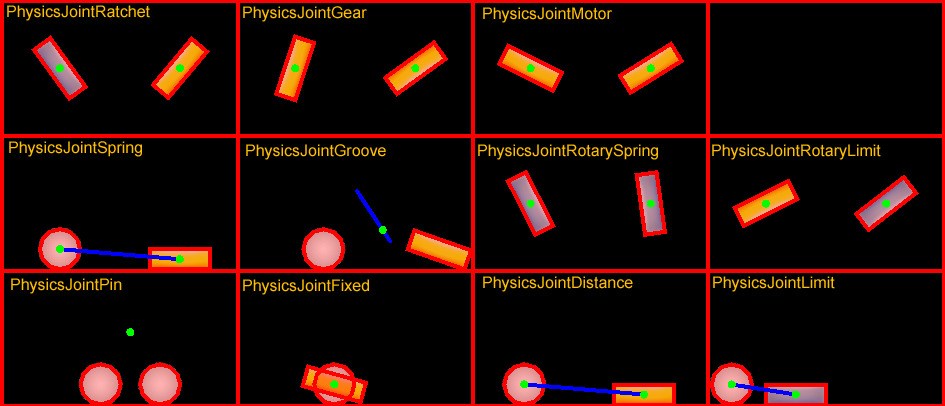
Each joint type has a definition that derives from PhysicsJoint. All joints are connected between two different bodies. One body may be static. You can prevent the attached bodies from colliding with each other by joint->setCollisionEnable(false). Many joint definitions require that you provide some geometric data. Often a joint will be defined by anchor points. The rest of the joint definition data depends on the joint type.
-PhysicsJointFixed: A fixed joint fuses the two bodies together at a reference point. Fixed joints are useful for creating complex shapes that can be broken apart later.
-PhysicsJointLimit: A limit joint imposes a maximum distance between the two bodies, as if they were connected by a rope.
-PhysicsJointPin: A pin joint allows the two bodies to independently rotate around the anchor point as if pinned together.
-PhysicsJointDistance: Set the fixed distance with two bodies
-PhysicsJointSpring: Connecting two physics bodies together with a spring
-PhysicsJointGroove: Attach body a to a line, and attach body b to a dot
-PhysicsJointRotarySpring: Likes a spring joint, but works with rotary
-PhysicsJointRotaryLimit: Likes a limit joint, but works with rotary
-PhysicsJointRatchet: Works like a socket wrench
-PhysicsJointGear: Keeps the angular velocity ratio of a pair of bodies constant
-PhysicsJointMotor: Keeps the relative angular velocity of a pair of bodies constant
Collision detection
Contacts are objects created by the physics engine to manage the collision between two shapes. Contact objects are not created by the user, they are created automatically. There are a few terms associated with contacts.
-contact point: A contact point is a point where two shapes touch.
-contact normal: A contact normal is a unit vector that points from one shape to another.
You can get the PhysicsShape from a contact. From those you can get the bodies.
bool onContactBegin(PhysicsContact& contact)
{
auto bodyA = contact.getShapeA()->getBody();
auto bodyB = contact.getShapeB()->getBody();
return true;
}
You can get access to contacts by implementing a contact listener. The contact listener supports several events: begin, pre-solve, post-solve and separate.
-begin: Two shapes just started touching for the first time this step. Return true from the callback to process the collision normally or false to cause physics engine to ignore the collision entirely. If you return false, the preSolve() and postSolve() callbacks will never be run, but you will still receive a separate event when the shapes stop overlapping.
-pre-solve: Two shapes are touching during this step. Return false from the callback to make physics engine ignore the collision this step or true to process it normally. Additionally, you may override collision values using setRestitution(), setFriction() or setSurfaceVelocity() to provide custom restitution, friction, or surface velocity values.
-post-solve: Two shapes are touching and their collision response has been processed.
-separate: Two shapes have just stopped touching for the first time this step.
You also can use EventListenerPhysicsContactWithBodies,
EventListenerPhysicsContactWithShapes, EventListenerPhysicsContactWithGroup
to listen for the event you're interested with bodies, shapes or groups. Besides this you also need to set the physics contact related bitmask value, as the contact event
won't be received by default, even if you create the relative EventListener.
For example:
bool init()
{
auto visibleSize = Director::getInstance()->getVisibleSize();
s_centre = Vec2(visibleSize.width/2, visibleSize.height/2);
//create a static PhysicsBody
auto sprite = addSpriteAtPosition(s_centre, 1);
sprite->setTag(10);
sprite->getPhysicsBody()->setContactTestBitmask(0xFFFFFFFF);
sprite->getPhysicsBody()->setDynamic(false);
//adds contact event listener
auto contactListener = EventListenerPhysicsContact::create();
contactListener->onContactBegin = CC_CALLBACK_1(PhysicsDemoCollisionProcessing::onContactBegin, this);
_eventDispatcher->addEventListenerWithSceneGraphPriority(contactListener, this);
schedule(CC_SCHEDULE_SELECTOR(PhysicsDemoCollisionProcessing::tick), 0.3f);
return true;
return false;
}
void tick(float dt)
{
auto sprite1 = addSpriteAtPosition(Vec2(s_centre.x + cocos2d::random(-300,300),
s_centre.y + cocos2d::random(-300,300)));
auto physicsBody = sprite1->getPhysicsBody();
physicsBody->setVelocity(Vec2(cocos2d::random(-500,500),cocos2d::random(-500,500)));
physicsBody->setContactTestBitmask(0xFFFFFFFF);
}
bool onContactBegin(PhysicsContact& contact)
{
auto nodeA = contact.getShapeA()->getBody()->getNode();
auto nodeB = contact.getShapeB()->getBody()->getNode();
if (nodeA && nodeB)
{
if (nodeA->getTag() == 10)
{
nodeB->removeFromParentAndCleanup(true);
}
else if (nodeB->getTag() == 10)
{
nodeA->removeFromParentAndCleanup(true);
}
}
//bodies can collide
return true;
}